随着科学技术的发展,机器人技术迅速崛起。面对于各行业人口红利的逐渐消失,各行业掀起一股“机器人”的热潮。近年电商的发展,促进了物流领域的企业纷纷投入先进机器人技术的研究及应用。以物流行业叉车AGV为例,该如何快速实现叉车AGV产品?如何构建AGV导航控制系统?
一 选择车载控制器
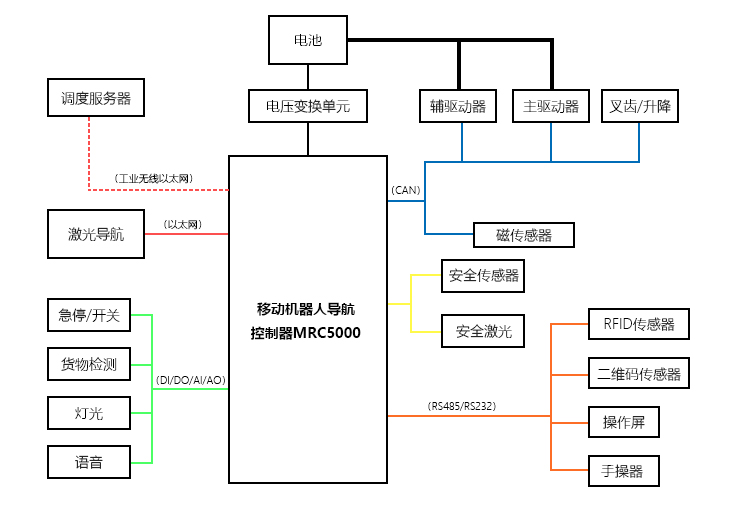
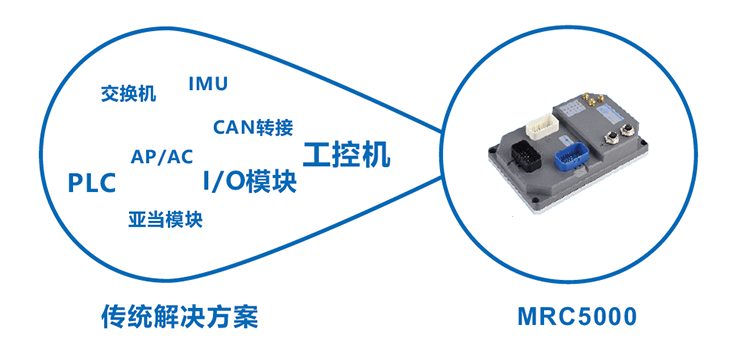
车载控制器是AGV主要核心,包含导航算法、通信及IO接口、控制逻辑,负责导航和引导等信号数据采集、数据计算、结果储存、机构控制等功能,目前一般分为PLC、工控机、单片机、专业控制器这几类。
科聪智能MRC5000自主导航控制器,集成了成熟的导航和运动控制算法,符合ICE标准的图形化二次应用功能开发和部署,稳定性和防护等级更高。MRC5000控制器支持自然导航、激光导航、二维码导航、磁导航、3D激光导航、混合导航等。
MRC5000控制器自带丰富I/O资源,传感器、驱动器可一键接入。控制器具备RS-232、RS-485、CAN、以太网等通讯接口,支持CANopen、Modbus RTU 主/从站、Modbus TCP 客户端/服务器 等标准通讯协议,同时支持自定义协议(可通过车辆设计二次开发)。

二 确定车辆底盘控制
车辆本地一般包含手动操作系统、行走驱动系统、转向驱动系统、叉齿驱动系统、供电系统,实现车辆行走转向一般取决于轮系方式、轮胎方式及电机驱动器。
u 轮系方式:单舵轮、双舵轮、四舵轮、两驱差速、四驱差速、四驱麦克纳姆轮等。
u 轮胎方式:充气、实心、导电橡胶、麦克纳姆等。
u 驱动器:柯蒂斯、萨牌、E-Motion、Copley、和利时、MOTEC等。
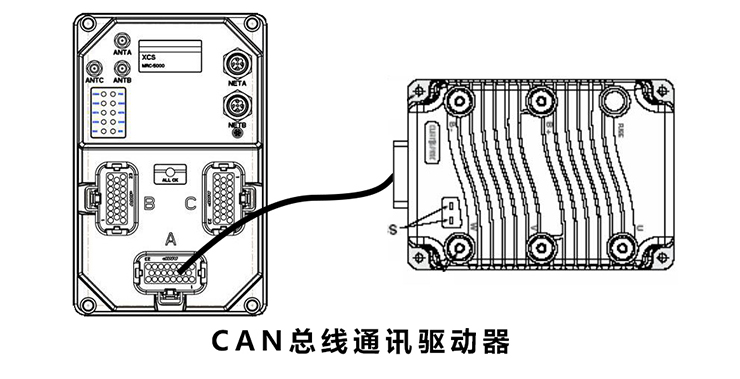
控制器与各品牌驱动器通讯,一般低端驱动器可以用模拟量或者脉冲信号传递数据,高端驱动器则采用规范的通信协议传递数据(RS-232、RS-485、CAN、以太网)。
以柯蒂斯驱动器为例,MRC5000控制器采用CAN总线通讯方式,CAN总线速度更快、采用差分信号抗干扰稳定性更高、有优先级和仲裁机制更加智能。
三 导航传感器接入
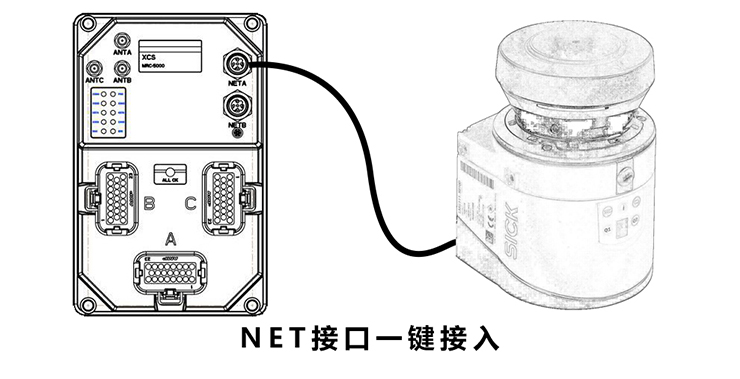
导航传感器,一般根据不同的导航方式,会采用磁导航传感器、激光传感器、二维码传感器等。
以激光导航为例,目前市面上常用激光品牌有SICK、倍加福等。MRC5000控制器支持全系列SICK激光,可通过以太网接口一键接入。
四 相关传感器接入
其他传感器包含安全传感器、叉齿位置传感器、货物检测传感器、灯光及鸣音系统、自动充电系统。
安全传感器,根据要求一般由安全激光、防撞触边组成。防撞触边属于接触式,接触到障碍物才会进行操作,而激光避障采用激光传感不用接触障碍物,更加安全。车辆一般这两种方式会组合使用,提高车辆安全性。
五 机器人软件使用
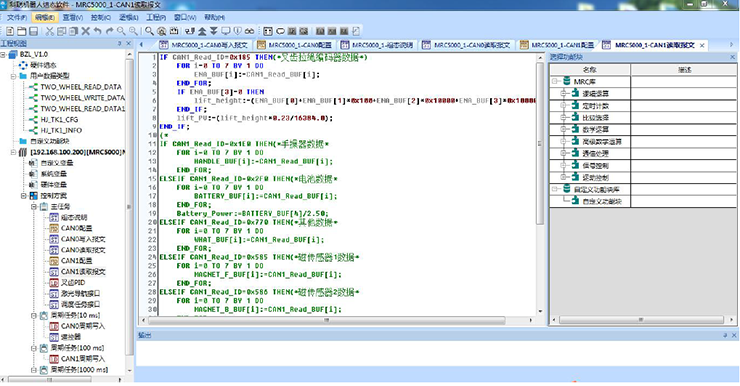
MRC控制器配套MRC二次开发平台 — 机器人设计 xRobotStudio,对移动机器人控制器的各种输入和输出进行二次编程,快速实现不同的控制逻辑、应用功能二次开发。软件提供符合符合IEC 6-1131/3标准,支持三种的可视化编程语言:LD(梯形图),FBD(功能块),ST(结构化文本)的图形化二次开发环境。
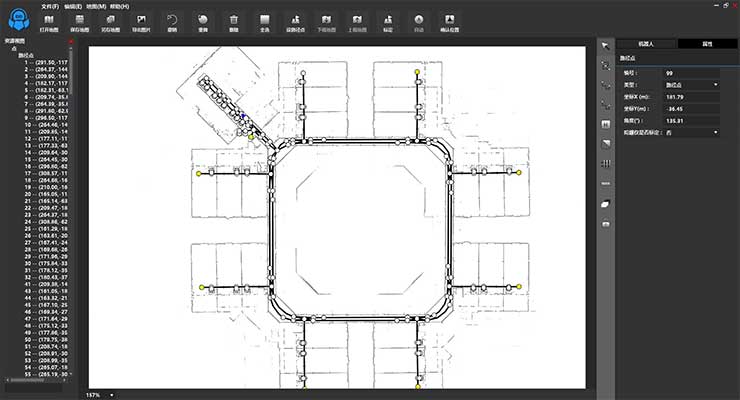
针对不同的应用现场,MRC5000配套机器人实施软件,快速高效的构建地图,具备快速编辑、拼接地图等功能灵活的路径构建能力,用户可快速的构建路径简单便捷的站点配置功能,建立所需工作点,实现机器人正常工作。