








无人机发展至今,在续航和以及功能上的进化已经到了一定瓶颈,于是,世界上主流的消费级无人机厂商便开始将安全性作为接下来产品的发力点,纷纷自开发了自家的“避障系统”(Obstacle Avoidance)。
所有无人机面临的难题当中,“避障”属于对技术和精度要求最高的一种。
让无人机自主感知周围环境并对接下来的飞行轨迹做出规划,这件看似简单的事情对无人机来说是个很大挑战,要想很好的解决这个问题需要无人机厂商自身在计算机视觉、超声波、雷达定位等方面有足够的技术积累。
那么,目前市面上主流的消费级无人机,比如大疆、YUNEEC昊翔、Parrot等都分别采用了什么样的自动避障系统呢?
昊翔 YUNEEC Typhoon H——复合避障
早在年初的CES上,昊翔 YUNEEC 就展示了其搭载 Intel Realsense 传感器的室内避障系统,直到前不久的 CES Asia,这款消费级的产品Typhoon H正式亮相,并展示了其最新的室外复合避障系统。

昊翔无人机/图 来源网络
如果说此前的室内避障演说,是一次针对无人机智能化想所未想的概念,那么相较于目前普遍存在的避障概念,此次高精度辨别障碍物并进一步规避的实现,则是无人机技术在智能化方面的飞越。
实际演示中,开启壁障系统的Typhoon H Realsense 可顺利实现跟随过程中对场景中树木的识别及躲避。
YUNEEC昊翔的Typhoon H Realsense 版所拥有的是超声波、可见光+结构光复合避障。台风H机身前部两个圆孔为超声波传感器,能通过收发超声波的方式,针对声波往返时间来计算出与障碍物的距离。
避障组件/图 来源网络
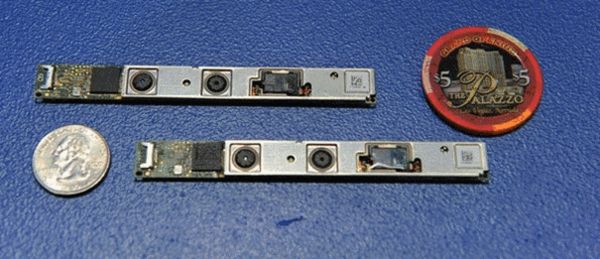
两个圆孔下方的长条状物体,就是台风H黑科技称号的来源——Intel RealSense模组。该模组采用了Intel实感技术,能将2个红外线摄像头、1个红外线发射器和1个RGB标准摄像头产生的信息集成到一颗指甲大小的图像处理器上,而进一步对物体表面进行精细建模,构建出三维空间信息。

昊翔无人机的避障摄像头/图 来源网络
在自然光充足的情况下(白天),台风 H Realsense 版通过RealSense模组可以识别10米左右的障碍物,并分辨出他们的形状和位置。在夜晚,借助主动红外线发射器,台风 H Realsense 版也能感知5米左右的障碍物。
大疆精灵 Phantom 4——双目测距法
今年3月5日,大疆正式发布了全新的精灵4,不负众望搭载了自动避障功能,原理是双目测距法。光线充足的环境下,检测距离达到在0.7米-15米,且能够根据飞行的速度控制无人机的飞行速度,调整停止的时刻,避免发生碰撞。

大疆无人机/图 来源网络
需要注意的是,Phantom 4 并没有采用全向避障,也没有超声波传感器,目前仅能实现正前方的检测。同时基于这项技术,Phantom 4 可以通过视觉传感器和软件算法,在一定条件下自动规划躲避的路线。
而所谓双目立体视觉,有点类似于人眼估计距离的原理,利用两个不同的图像传感器,固定之间的距离,测量物体与传感器之间的夹角,已知两传感器之间的距离和物体与两传感器之间的夹角,根据三角测距定理能够计算出物体与无人机之间的距离。
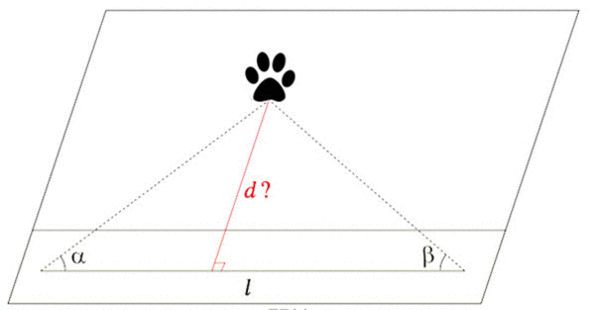
双目测距法原理/图 来源网络
双目立体视觉算法由大量的代数方程组构成,对数据的处理量通用巨大,需要多台顶级的计算机进行协同计算,因此如何降低处理器的能耗并提高计算性能成为了诸多无人机厂家面临的问题。
零度 Xplorer 2——激光雷达 TOF
TOF 是 Time of Flight 的简写,大概意思就是说根据飞行的时间来判断,基本原理依靠传感器发射一定频率的红外/激光信号,然后根据反射信号与原信号的相位差计算信号的飞行时间,即可换算出距离障碍物的距离。

避障组件/图 来源网络
在悬停状态下,TOF系统会一直保持快速旋转,每秒钟旋转2-5圈。通过旋转,可以在短时间内完成对周围有效半径内的360°范围进行快速扫描,从而用较快的速度发现障碍,然后对飞控系统发出调整位置的指令,以此来进行避障。
在飞行状态中,TOF系统则会停止旋转,只把光发射到前进的方向上。固定方向的时候,在室外的有效距离可以增加到8-10米。检测到障碍物之后1秒的反应时间,无人机可以用一个较大的加速度来停止前进。

零度 Xplorer 2/图 来源网络
就拿零度 Xplorer 2这款产品来说,使用的是光相位检测,顶部类似小蘑菇的传感器发射出激光雷达,以每秒50次的速率360°快速扫描四周的环境,绘制出3D模型,将物体的三维轮廓转换为机器所理解的语言。
TOF激光雷达的方式较为成熟,但光波容易被干扰这一点也不容忽视,系统发出的光,必须避开太阳光的主要能量波段,从而避免太阳光的直射、反射等对避障系统造成干扰。
总结
上述避障方法基本代表了目前主流的消费级无人机对于避障这件事的解决方案,他们各有优劣但都还处于较为初级的阶段,所适用的场景、对障碍物的识别以及抗干扰能力都还有很大的提升空间。
其中,双目测距法和TOF激光雷达两种技术主要依赖于传感器,而搭载 Intel Realsense 的 Typhoon H,其核心是通过计算机视觉将周围环境数字化,以此规划对飞行路线实现避障。
避障技术之于无人机就像AI大脑之于机器人,对于整个无人机产业来说是一场革命性的创新,一方面可以提高无人机的安全指数,另一方面也可以也将降低无人机的操作难度。


