机器人拣选作业是由机器人来进行品种拣选,如果品种多,形状各异,机器人需要带有图象识别系统和多功能机械手,机器人每到一种物品托盘就可根据图象识别系统“看到”的物品形状,采用与之相应的机械手抓取,然后放到搭配托盘上。分拣抓取机器人要进入市场仍需一段时间,一旦这些智能化的分拣机器人应用于电子商务、工厂、物流等行业,将极大地提高仓储管理的工作效率,压缩人工成本。短期内仓储系统必然是以自动化与人工辅助的形式存在的,要真正实现无人仓储还需要一段时间。
3.1 Fetch and Freight :拣货机器人和仓储运输机器人的深度结合
Fetch和Freight是硅谷机器人公司FetchRobotics的仓储机器人。Fetch Robotics成立于2014年,2015年6月从以软银为中心的三家公司获得了2000万美元的融资。Fetch Robotics与Innovation Matrix于2015年7月底缔结了销售合作关系。Innovation Matrix将在日本、台湾、新加坡和澳大利亚销售Fetch Robotics的商品。
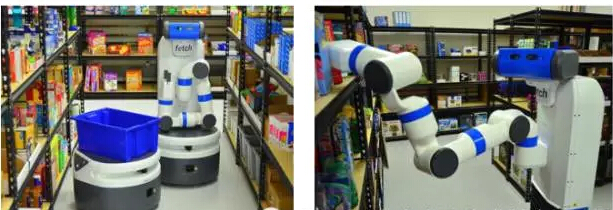
Fetch and Freight 实现拣货机器人和仓储运输机器人的深度结合,从而保证整个仓储系统的无缝运行。Fetch and Freight主要包括两个部分,配备可从货架上拿取特定商品的机械臂的Fetch;与Fetch一同行动,运输拿到商品的“Freight”。 Fetch可利用摄像头、图像处理和导航技术等,根据订单内容,利用机械臂将位于货架某一位置上的特定商品取下来,然后交给Freight运回打包。不工作时,机器人会自动返回充电桩进行充电。

Fetch and Freight工作原理: Fetch经由无线LAN与服务器通信,根据服务器的指示在货架之间移动,捡取商品。移动过程中利用激光传感器和摄像头掌握周围的情况,实时将障碍物的位置录入数字地图中。这样就能一边躲避障碍物一边向正确位置移动。Fetch的机械臂长2英尺(约60厘米),配备7个关节,能在避开货架和其他商品的同时,拾取最大6千克重的商品。Fetch取下的商品交给一同行动的Freight。
Freight也配备了激光传感器和摄像头,能根据数字地图边躲避障碍物边自律移动。“Fetch”和“Freight”都可以自动跑去充电,使用相同的充电座。从电池到驱动器,Fetch都是明显地瞄准产品需求,而非实验室需求。它们耐久力很好,即使在最差的使用场景下也有一万三千小时的使用寿命(指让机械臂连续挥舞一个6公斤负载)。在更一般的情况下,“Fetch”预计可用每天工作16小时,一年工作365天,连续四年而不发生故障。“Freight”因为没有安装复杂的机械臂,预计可以用更久。
Fetch:其核心部件是一个可以反转(back-Drivable)的7自由度机械臂,拥有高达6公斤的额定载荷,这个力量足够应对实际典型仓储中90%~95%的货物。“Fetch” 长长的手臂能够够到从地板到将近两米的高度,这意味着它可以基本上覆盖人类的抓取范围。其模块化的抓取器拥有标准ISO接口,并配有以太网接口。“Fetch”头部装配有一个PrimeSense的3D感知器,可以上下左右转动。头部还有一系列空余接口,可以按需要装配更多传感器。基座有一个充电座,一个25米有效范围的导航&避障SICK激光雷达,和一个差分驱动。
Freight:基本上就是把“Fetch”从腰部截断剩下的部分。它配有相同的差分驱动和25米激光雷达。和“Fetch”相比,其最大优势就是速度 ——现在它可以轻松达到2m/s,并且有可能冲到3m/s。“Freight”顶部有很多固定点,用户可以把任何他认为合适的篮子放在上面。它可以承重70公斤,其实甚至可以更多。
3.2 日立HITACHI智能机器人:实现在物流仓库内移动并自动装卸和搬运货物
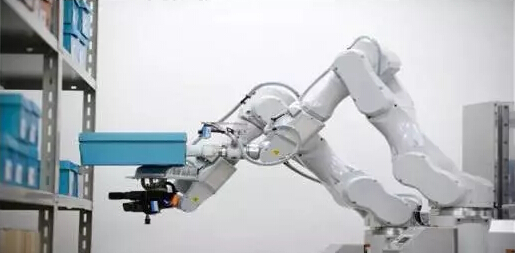
目前,在物流仓库实际投入使用的搬运机器人能连续搬运同一形状的纸箱等货物。但是,从货架上的箱子中取出特定货物,或搬运多种形状的物品在技术上仍有困难。日立开发的新型机器人采取的构造是,在移动平板车上安装2个升降台,然后分别装上操作臂型的机器人。一条机械臂的顶端装有吸附装置,另一条顶端装有2根机械手指。移动到指定货架之后,调整升降台高度,利用机械臂上安装的摄像头确认货物,然后以符合其形状和重量的方法拿起来。日立将建立在实际仓库内能稳定运行的系统,首先在本公司的物流仓库上使用,之后再考虑向其它公司出售。
例如,在取出箱中的PET瓶时,首先利用吸附装置将货架上的箱子移到近前,然后用2根手指抓住箱中的PET瓶并拿出来。如果是重量较大的物品,还会从下面托着进行搬运。从硬纸箱到1块肥皂,新型机器人可处理各种大小和重量的货物。
由于整体构造包括1台平板车、2个升降台和2条机械臂,总共5个装置,因此能实现多样化动作。但要相互协同工作,各个装置之间需要通信联动。平板车一边利用智能传感器测量与货架之间的距离一边行驶,但只在距离还剩1米、需要共同作业时才会向机械臂发出信号。通过减少通信量,提高了动作速度。从在货架前停止到取出箱中物品,只需3秒即可完成。
3.3 Bastian机器人:最新的货到机器人电子履单系统
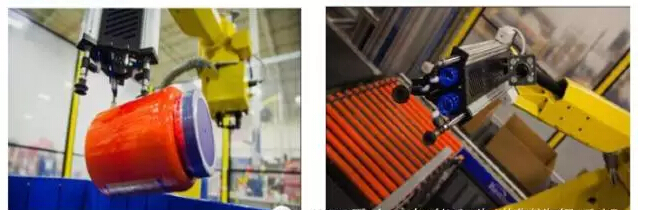
Bastian系统方案公司研发出最新的货到机器人电子履单系统,Bastian机器人系统中集成了自动化存储及选单系统、滑索式运输机装置,可拣选单个物品,功能强大,极大减少了运输线上物品的拣选及运送时间,从而达到提高生产效率的目标。
Bastian机器人集成了一些先进的2-D和3-D视觉组件,有着灵活强健的机械手臂末端工具(EoAT),专门为货到机器人(goods-to-robot)拣选解决方案而设计。该解决方案能够对最复杂的成批产品进行拣选。系统能以模块化方式设计,允许容易地引入新产品并由机器人进行鉴别。
工作原理:首先,一个装有任意物品的货品箱出现在3-D摄像系统中,在这一点上拍摄一系列照片绘制出物品的方位,就在一瞬间,机器人和视觉控制系统识别出“最可能的”拣选对象,释放机器人进行选择。一旦确定了目标对象,控制系统操纵机械臂和货品箱内的EoAT,使用吸力或一个扣人心弦的技术来选择一个物品,而不碰到其他物品或手提袋的四壁。此时机器人从箱子中缩回,把物品放到二级装运箱,然后准备下一个物品拣选,并按顺列排好。
主要优势体现在:不需要上游分拣随机箱装的产品;缩短了从成堆商品中选择物件的繁琐耗时的过程;新引入的SKU快速模块化编程;降低人工成本;提高订单准确度;每小时拣选产品多达350个;无缝集成产品输送机、托盘输送机和AS/RS等辅助设备。扩展应用范围广,如将散装物品成批运送到输送机,为质量检查选择散装的、不规则的物品,通过从多个箱子里挑选零件进行零件装配等。