






项目背景
在物流智能化需求迅速增长的推动下,叉车作为搬运的核心设备,也越来越向智能化的进程快速演进着,如何实现精确定位,自动路径规划,目标托盘的搜索,检测,对孔,搬运及装卸工作,成为各大智能叉车厂商首要考虑的问题。
项目基本情况
需要解决的问题
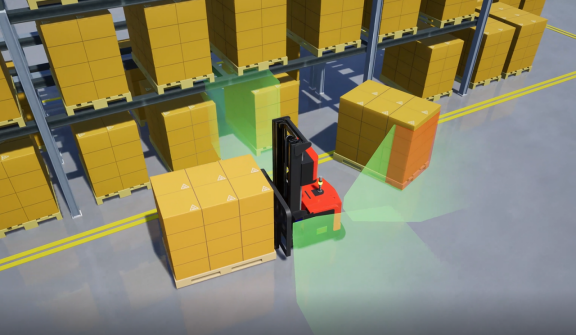
针对一些仓库货物放置环境复杂,人工/货车放置托盘的位置不够精确,导致无人叉车依靠传统的机械限位或者单目相机识别的方式无法准确识别托盘姿态,常常出现无人叉车对接托盘位置偏移角度较大,进而导致进叉失败,叉车工作效率低下。
托盘视觉识别技术解决方案
依靠维感科技推出的工业级3D ToF深度相机DCAM550及RGB-D深度相机DCAM560C进行托盘图像采集,结合相应图像处理算法对叉车货物托盘进行识别,并得到其位置与姿态坐标,智能调整进叉方向从而实现无人化智能托盘搬运,解决无人叉车对接托盘位置偏移角度较大的问题。同时,结合人工智能算法对托盘识别模型进行强化训练和深度学习,提升其识别叉车货物托盘与跟踪的准确性。

维感科技TOF深度相机特点及优势:
- 基于3D ToF技术,不受环境光照的影响,可在强光和黑暗中完成识别;
- 高分辨率640*480的VGA深度图像
- 深度数据动态跳动小,噪点少
- 支持DC/PoE+供电, 完整SDK支持(ROS,C/C++)
- 高性价比,现货交付
- 多种物理接口方案(USB, RJ45, 航空接口), IP67防水防尘等级可选
- 工业级产品,方案成熟,性能稳定,已在多款AGV项目上量产使用
其他应用
AGV避障
3D视觉在移动机器人及低速无人驾驶领域,基于其面阵探测的原理,也可以为其提供近距离(<6m)大角度的避障方案。ToF相机在低速驾驶领域的应用,往往与单线激光雷达结合互补使用:单线激光雷达探测距离比3D ToF相机远,但没有垂直视场角,适合对低矮障碍物进行探测;而3D TOF深度相机垂直视场角大(可达90度),探测距离在6米内,适合对中高处障碍物进行探测。两种方案结合使用,是目前低速驾驶领域低成本全方位避障的较优选择。
仓位监测、库位检测、电子围栏
3D视觉精准识别出仓库库位情况,从而辅助AGV实现精准定位和取放货;同时,结合识别算法,起到电子围栏的效果,当有人员进入区域时,进行报警提醒。
台车脚轮视觉定位
在确定四轮台车的相对姿态和位置时,3D视觉可以通过识别台车脚轮的位置为AGV提供准确的定位。
物流车挂拖钩装置识别
AGV物流车在园区工作期间,需要在无人辅助情况下自动完成拖挂钩的动作,在这个过程中,需要3D视觉技术完成拖挂钩装置的识别。
维感科技新品简介
继DCAM550/DCAM560C推出后,维感科技开发了基于SONY最新款TOF芯片的DS77系列,精度更高,覆盖场景将更加多元化,目前产品已开始给客户送样测试。

关于维感科技
维感科技有限公司核心团队来自于2021年刚被字节跳动收购的北京小鸟看看科技有限公司,团队自2016年开始积累三维图像,计算机视觉,图像处理及传感器融合技术,成为国内首屈一指的ToF 3D技术提供商,得益于核心团队在电子行业多年积累的经验,维感科技有限公司在研发实力、产品交付、品控和服务能力上,都已达到海内外一线品牌工业客户对核心供应商的高标准要求,下一步将继续拓宽工业级相关产品线,在工业自动化、智能物流、移动机器人等使用场景上面得到更多的验证和推广。
核心使用场景包括:
• 客流统计与行为分析
• AGV/AMR避障与栈板识别
• 物流领域单件分离包裹识别
• 物流领域仓库货位检测
• 工业自动化领域图形辅助等
加速全球覆盖
凭借技术方案的稳定性和产品的高性价比,维感科技收到了来自美国、德国、日本、韩国等全球多个国家合作伙伴和客户的订单。2022年,维感科技将和全球合作伙伴一起全力加速3D ToF相机在海内外市场的业务覆盖,并陆续亮相国内外几大物流和自动化展会:
· 6月亮相美国AUTOMATE工业自动化展
· 9月亮相日本Logis-Tech物流技术展和传感器展
· 10月亮相德国MOTEK和Vision展
· 12月亮相日本国际图像设备展


